2024年 1月 5日
2024年 9月23日
2025年 2/25
関西大学システム理工学部 電気電子情報工学科
超高周波工学研究室
教員 佐伯 拓
学生 B4 野口、B4 木村
オプティカルフロー、カラートラッキング、移動体検知等、コンピュータビジョン(CV)を用いた制御法の開発が近年進められている。
特にヨーロッパ等の諸外国、アジアなど、ITが盛んな国で研究が進められている。
日本では、今現在、各種のロボット制御において旧来のPID制御、各種センサーを用いた古典的制御が盛んに行われている。
一方、CVといえば、国内を見てみるとデスクトップPCを用いた画像解析による計測等が行われている。
この背景・原因として、今まで移動体に搭載可能なマイコンの情報処理能力が性能が低く、画像を取り扱うまでにいたらなかつたためと聞いている。
しかし、今後のIT化やAIの更なる発展・進化では次世代技術として画像データを用いた各種の乗り物や移動体の制御が将来的に必須となってくると考える。
我々は、手始めにスロースピードで動く車やキャタピラ車をベースとし、それらを1例とし切り口にして、画像データ処理を用いて制御される地上で動く移動体の開発を進める。
下記が現在進行中の研究テーマである。
1)磁気車輪を用いたMLB移動制御
2)EHD推進デバイスの高度・左右移動制御
1.コンピュータビジョンでの画像データを用いたEHD推進デバイスの高さ制御

図. コンピュータビジョン(CV)での画像データを用いたEHD推進デバイスの高さ制御装置 2024.09.21
上図は、コンピュータビジョン(CV)での画像データを制御に応用した例で、EHD推進デバイスの高さ制御の1例である。
画像データ処理を用いて浮上の高さを制御することに初めて成功した。
上記画像処理方法についての詳細は学会にて報告する予定である。
2.コンピュータビジョンでの画像データを用いた制御 実施例
学生B4 木村
最近のコンピュータの情報処理速度が向上し、画像認識の技術を用いた機械や移動体の制御の可能性が
高まってきている。
人間の五感のうちの1つとして視覚が挙げられる。
人間の脳の情報のうち、視覚の情報利用が大半を占めており、
我々は、人間の目に代わる存在として、コンピュータ上での画像の活用に着目している。
現在、世の中は物体認識の技術のみにとどまつているが、我々の研究の目的は、画像情報をコンピュータに取り入れ、その情報を元に移動体の制御の実現を目指している。
1例として、ここでは、物体認識技術を用いた移動体の制御の研究について述べる。
具体的には、物体の認識方法として、カスケード分類器を用いた。
カスケード分類器は、従来から知られているYOLOによる物体認識方法と比べ、計算処理量が少なく、短時間で高速に物体を認識・処理することが可能である。高速のPCを使用する必要がなく移動体にマイコンを搭載した場合、能力の低いマイコン等に搭載することが可能である。
我々は、カスケード分類器の学習方法について研究を行い、実際にキャタピラ車(移動体)に搭載したラズベリーパイで標識を認識して、キャタピラ車の制御に成功した。
ここで示した制御は例として2つである。
研究内容
1.とまれ STOPの標識を認識させて実機を停止
2.左折可 左へ曲がるの標識を認識させて、標識を認識後、左折させる。
ここで示したカスケード分類器の応用は、言わずともかな、かなり広範囲の分野に可能となる。
ここでは割愛する。


図.機械学習を行った画像2例 1)停止、 2)左折可
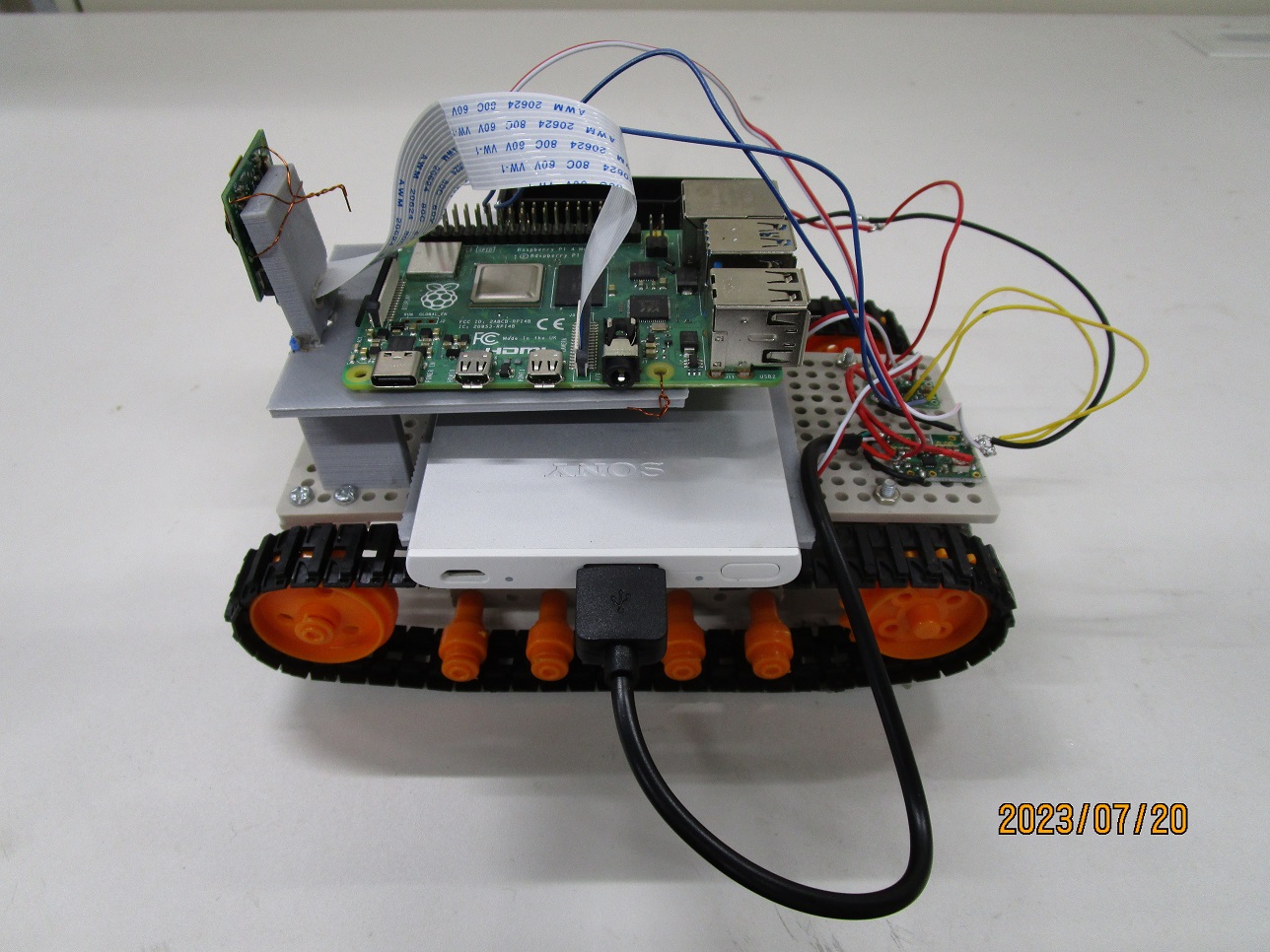
図.今回制御に用いたキャタピラ車 ラズベリーパイ搭載